- Título completo Sistema robótico para o aperte por par no sector eólico
- Entidad financiadora Xunta de Galicia
- Investigadores José Antonio Becerra Permuy, Francisco Javier Bellas Bouza, Richard J. Duro Fernández, Andrés Faíña Rodríguez-Vila, Adolfo Lamas Rodríguez, Fernando López Peña, Abraham Prieto García, Marcos Lema Rodríguez, Daniel Souto García, Santiago Vázquez Rodríguez
- Fecha de inicio 07/10/2008
- Fecha de fin 06/10/2011
- Texas Controls S.L
- Universidade da Coruña
Descripción
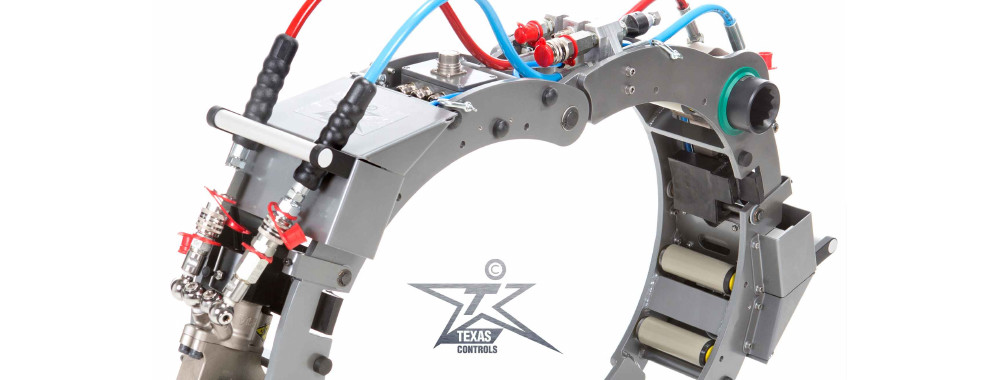
En este proyecto se ha desarrollado una herramienta que permite realizar el apriete de los pernos de la unión de la reductora con el eje de un aerogenerador. Son uniones con un gran número de pernos cuyo apriete se realiza por par mediante el empleo de llaves hidráulicas. Es un proceso laborioso que ha de seguir un patrón de apriete iterativo, en el que en cada paso son apretados dos pernos diametralmente. Además, el peso de las llaves y la presencia del eje de la propia reductora en el espacio de trabajo hacen necesario la presencia de dos operarios para realizar la operación.
La solución que hemos desarrollado consiste en un bastidor capaz de rodar sobre el eje del aerogenerador el cual es el que porta las dos llaves hidráulicas encargadas realizar el apriete de los pernos. Este sistema funciona de modo semiautomático, de manera que tras posicionar el operario el sistema hasta los pernos que se desean apretar, el sistema posiciona automáticamente las llaves en los mismos, realizando a continuación el apriete correspondiente. Una vez realizado, el sistema retira las llaves de su posición para que el operario vuelva a girarlo hasta el siguiente par de pernos a apretar. Además, el sistema dispone de la sensorización necesaria que hace posible la realización de la operación solamente con un solo operario.