- Título completo Airobs: Aproximaciones inteligentes para la reconfiguración automática de sistemas robóticos multicomponente en entornos dinámicos y no estructurados
- Entidad financiadora Xunta de Galicia
- Investigadores Francisco Javier Bellas Bouza, Richard J. Duro Fernández, Álvaro Deibe Díaz, Juan Monroy Camafreita, Abraham Prieto García, Santiago Vázquez Rodríguez, Andrés Faíña Rodríguez-Vila, Rafael Tedín Álvarez, Gervasio Varela Fernández, José Antonio Becerra Permuy
- Fecha de inicio 01/10/2009
- Fecha de fin 30/09/2012
- Universidade da Coruña
Descripción
El objetivo fundamental de este proyecto fue el desarrollo de una arquitectura modular distribuida para robots autónomos de aplicación en entornos industriales dinámicos y no estructurados, continuando el trabajo iniciado con el proyecto McRobs realizado por el GII.
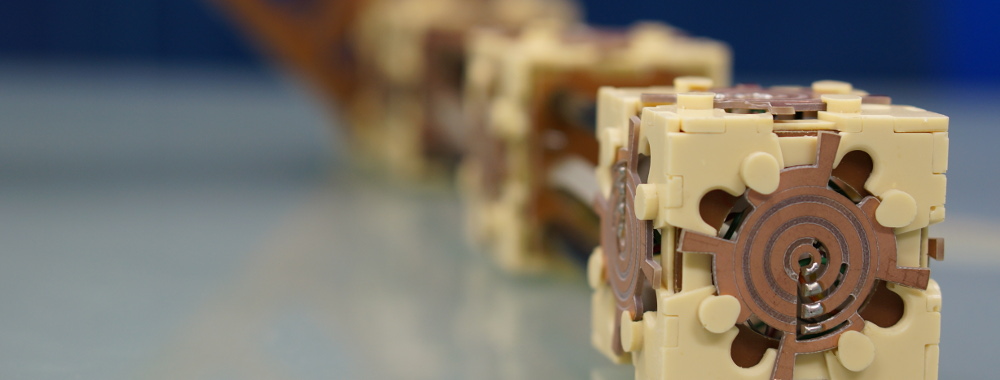
Una de las principales aportaciones de este proyecto fue el establecimiento e implementación de una serie de características necesarias en la arquitectura anteriormente desarrollada para operar en entornos industriales dinámicos. Estas características, además de la heterogeneidad de módulos, abarcan la redefinición de los módulos, nuevos mecanismos de conexión desarrollados, implementación de sistemas de comunicación distribuida, etc. La filosofía seguida para la decisión de qué módulos habrían de estar presentes correspondió a la determinación de los pares cinemáticos que serían necesarios para las tareas encomendadas en el entorno prototípico y su plasmación en estructuras con actuación simple (un solo grado de libertad por estructura con el objeto de simplificar su mecánica). De todos modos, se optó por realizar dos implementaciones distintas para cada par cinemático de manera que se obtuviesen módulos con características diferentes, lo que aumenta la flexibilidad de la arquitectura resultante.
El sistema modular final se probó en situaciones reales mediante la fabricación de módulos prototipo totalmente funcionales.